
Muitas vezes na linha de produção temos recursos que são chamados de recursos compartilhados, ou seja, podem estar produzindo dois produtos diferentes simultaneamente. Esse é muitas vezes o caso de Estações Robotizadas, em função do custo dos robôs as indústrias criam estações de trabalho onde 2, 3 ou até mesmo 4 operadores fazem a preparação de produtos diferentes para que o robô execute ações como soldagem, furação, acabamento, colagem, etc. Desta forma uma mesma estação pode operar simultaneamente inúmeras OPs (ordens de produção). Nesse artigo vamos mostrar como o Kite MES permite a gestão do Robô, calculando OEE e OLE (saiba sobre OLE no artigo “O que é OLE e como medi-lo?“) da célula e de cada posto de trabalho independentemente.
Gerenciar recursos na linha de produção, como máquinas por exemplo, é uma tarefa bastante complexa. Um dos problemas é a coleta de dados (como mencionamos no artigo “Vantagens de utilizar um coletor de dados sem fio na produção” ) porque as informações tem que estar corretas, é claro, e disponíveis em tempo real. Para máquinas foi desenvolvido o conceito de OEE (veja mais detalhes no artigo “O que é OEE e quais as vantagens de medi-lo?“) mas e quando esse recurso é compartilhado, ou seja, trabalha em mais de um produto ao mesmo tempo?
Isso ocorre com frequência em estações robotizadas, onde o robô pode trabalhar em mais de um produto. Enquanto o robô está trabalhando em uma peça as outras estão sendo preparadas por operadores mas note que o operador que prepara para o robô está parado, aguardando o robô terminar o trabalho para inciar a próxima operação. Ou seria um operador só que está preparando outra peça enquanto o robô executa a tarefa na primeira?
Notou como pode ser complexo? Como contabilizar o operador parado enquanto aguarda o robô? E se o robô tem uma parada todos os operadores irão parar, como computar isso?

O diagrama mostra um exemplo do robô executando uma tarefa em uma peça enquanto a outras peças estão sendo preparadas, se for um operador ele estará preparando a peça que o robô irá trabalhar em seguida, porém se forem 3 operadores eles terão que aguardar que o robô encerre a atividade para preparar a próxima peça.
Em estações robotizadas compartilhadas normalmente a peça A não possui nenhuma relação de tempo padrão, quantidade, operações com a peça B ou peça C em produção.
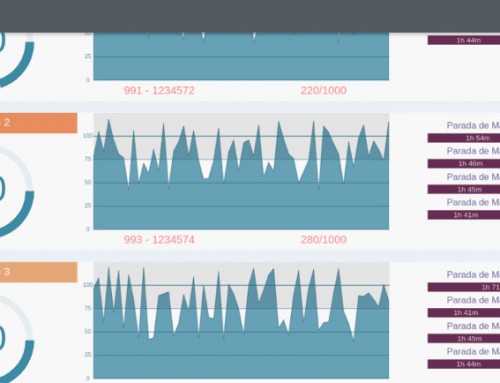
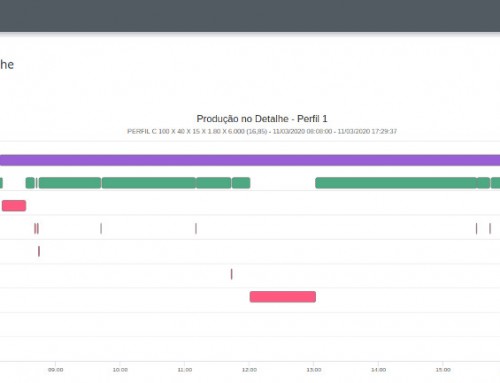
O Kite MES possui um módulo de gestão de estações robotizadas que permite configurar e gerenciar o trabalho de cada operador individualmente calculando em tempo real o OLE e também o OEE, nesse caso considerando como se o robô se comportasse como um máquina e produzisse somente a peça relacionada como o posto de trabalho.
Além disso o Kite MES calcula o OEE do robô considerando o trabalho em todos os postos de trabalho e também o OLE do grupo de operações que estão alocados nessa estação robotizada. O cálculo do OLE em estações robotizadas permite analisar se existe ociosidade e desbalanceamento na estação e isso propicia a ações de reformulação da célula e do planejamento da produção trazendo benefícios imediatos. O OEE do robô leva em consideração somente o tempo de trabalho dele próprio, ou seja, não considera o tempo de preparação e “despreparação” que sera controlado no OLE, isso permite a visualização dos problemas de forma individualizada.
Ufa, se é difícil de explicar imagina de gerenciar estações robotizadas mas o Kite MES consegue porque permite a avaliação individualizada e em grupo para estações robotizadas e utilizando sempre o Kite Collector como ferramenta de coleta de dados em tempo real.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}